背景需求:
目前,制造业中随着产线自动化,智能化需求的不断提升,2D视觉引导+机器人已经成为行业中的主流应用方案。然而随着产线中产品多样化,复杂化,快速化的需求不断增加,对于高性价比的3D视觉定位引导+机器人系统的需求愈加迫切。
关键技术:
对于3D视觉定位引导技术,其主要核心部分在于如何设计和实现成本可控的高性价比3D成像解决方案模块及对应的软件二次开发算法部分。根据对市场需求的理解,我们为客户打造了基于双目+结构光混合技术的2D&3D成像和处理模块,能够满足不同应用场合下的需求。
例如,对于机器人拆垛,码垛过程中的需求,我们提供的方案如下:
1. 按被定位物体的性质不同,将物体进行划分:
按不同形状区分:箱体、袋、包裹、金属零件等;
按不同精度区分:<5mm,<1cm,...;
按不同体积区分:中小物体(各种零件等),大物体(箱子、麻袋、包裹等);
2. 安装结构示意图:
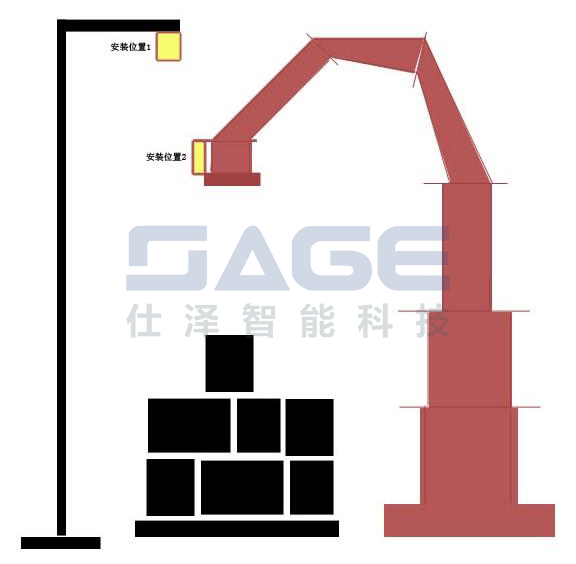 3. 安装方式说明:
3. 安装方式说明:
A.
固定高度安装
3D成像模块安装在位置1,固定在距离底盘所在平面一定距离(如:2米)的位置进行拍照。
B.
机械手安装
3D成像模块安装在位置2,每次调整机械手在距离垛顶一定距离(如1.5米)的位置进行拍照。
4. 定位抓取流程:
机械手控制台下发扫描指令,控制机械手走位到正确位置进行拍照,传感器计算景深信息,计算模块结合传感器发回的深度图和RGB图,进行垛顶箱体的分离和计算,最后向控制台发送垛顶所有箱体的中心点位置和方向信息,计算机拿到这些信息后,指挥机械手逐个箱体进行抓取。
5. 方案优势:
高性价比、高灵活性,可根据客户需求进行定制开发。
 6. 3D成像模块介绍:
6. 3D成像模块介绍:
3D相机通过左右红外摄像头获取图像,计算深度图,再结合RGB图,输出物体的方位信息(中心点坐标和XYZ方向)。
所有的分拣提取算法都可以内置在PixI工业相机中执行,不同现场运行程序不同,支持二次开发。